





针对此,笔者近日特意做了一个小调查:我们卡尔德柔性电缆是一家专业研发生产拖链电缆、机器人电缆、伺服电缆的工业控制电缆的科技型企业,本身的客户就是一些工业机器人生产研发企业或者应用企业,按理说我们卡尔德电缆的员工对于工业机器人的了解相对于其他行业的从业者而言是了解的比较多的,而实际上,通过笔者的调查,虽然说我们卡尔德的员工对于工业机器人有一定了解,比如说也知道六轴机器人有分为机器人本体,机器人控制柜等等这些。但是详细到什么是机器人本体,什么是机器人控制柜等等,还是不能说出一个一二三来。
不过,没关系,知之为知之,不知为不知,现在不知道,那我们就一起来了解工业机器人由哪些组成,还有工业机器人的工作原理等等这些吧!
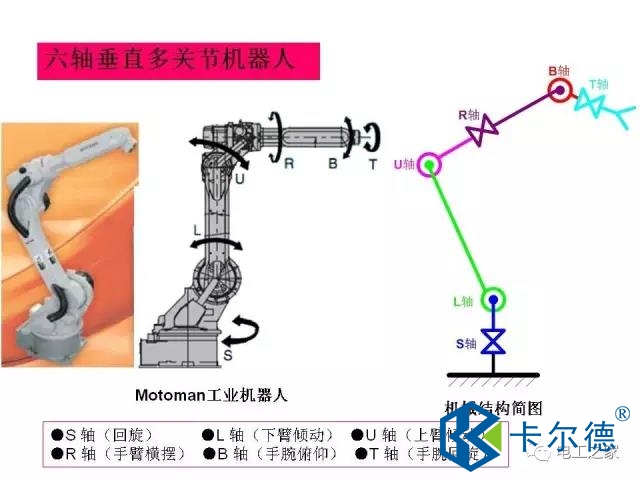
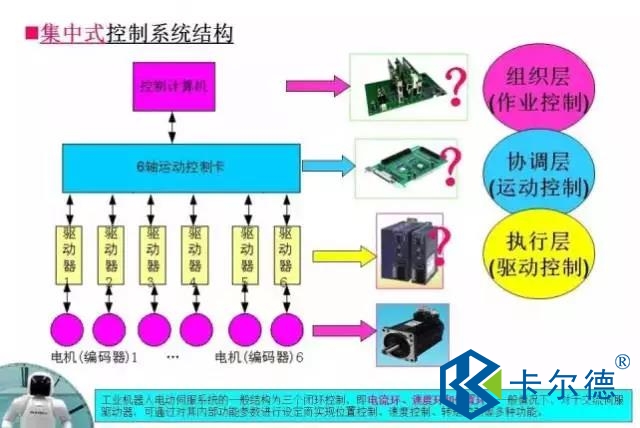
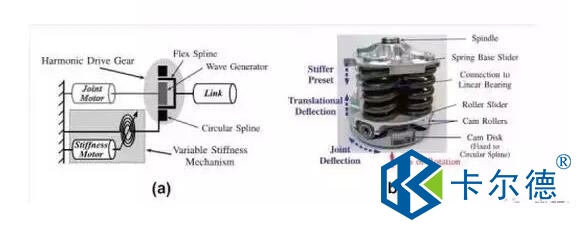
为了让大家对于工业机器人的组成有一个清晰的认识,下面我给大家采用图文并茂的形式给大家阐述:






通过上面这些图文,我相信大家对于工业机器人的组成已经有了比较感官的认识了吧。如果还想亲身体验或者感受工业机器人,尤其是6轴机器人的,建议大家可以去观展一些比较大型的机器人展会,展会上都会有机器人展示的,也会有专人给您做介绍。
了解完了工业机器人的组成,那么跟着我们卡尔德柔性电缆来了解工业机器人的工作原理!
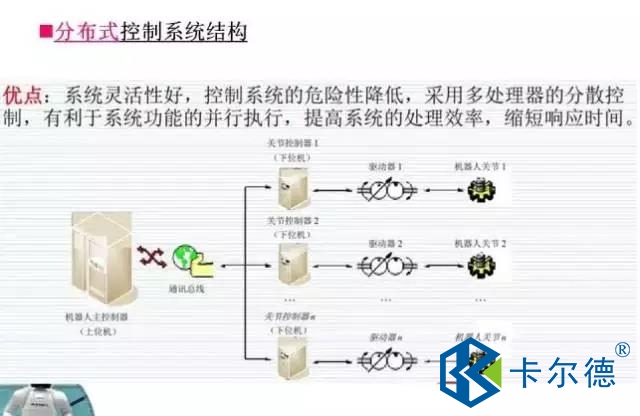
二、工业机器人工作原理与技术参数
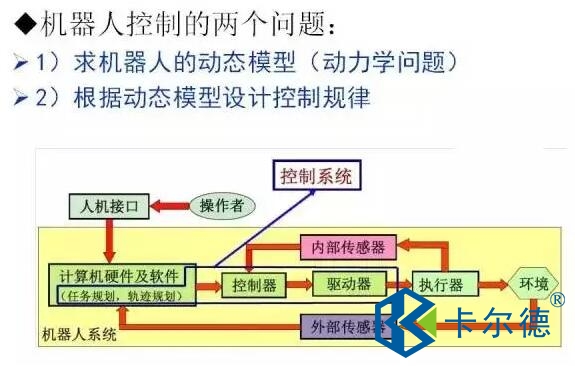
1、机器人的工作原理
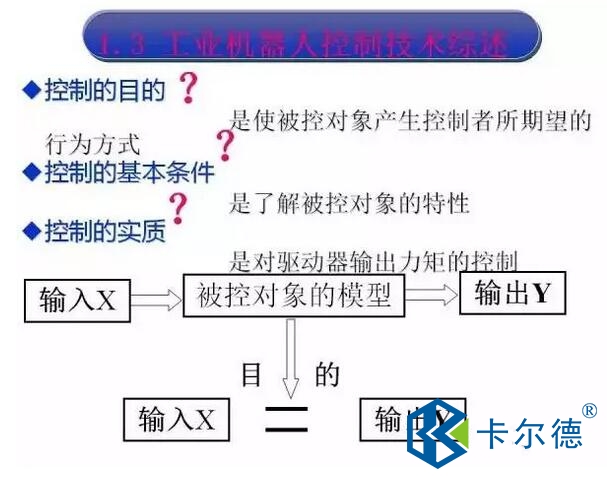
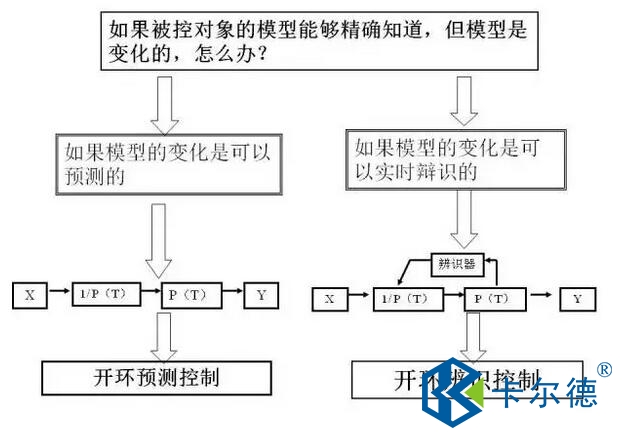
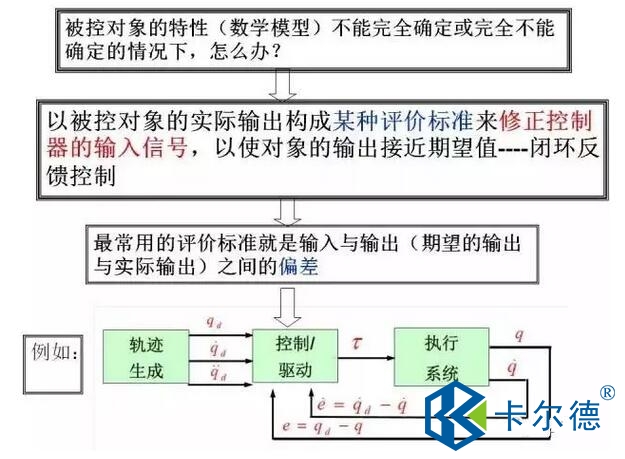
机器人的工作原理是一个比较复杂的问题。简单地说,机器人的原理就是模仿人的各种肢体动作、思维方式和控制决策能力。从控制的角度,机器人可以通过如下四种方式来达到这一目标。
“示教再现”方式:它通过“示教盒”或人“手把手”两种方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,如喷涂机器人。
“可编程控制”方式:工作人员事先根据机器人的工作任务和运动轨迹编制控制程序,然后将控制程序输入给机器人的控制器,起动控制程序,机器人就按照程序所规定的动作一步一步地去完成,如果任务变更,只要修改或重新编写控制程序,非常灵活方便。大多数工业机器人都是按照前两种方式工作的。
“遥控”方式:由人用有线或无线遥控器控制机器人在人难以到达或危险的场所完成某项任务。如防暴排险机器人、军用机器人、在有核辐射和化学污染环境工作的机器人等。
“自主控制”方式:是机器人控制中最高级、最复杂的控制方式,它要求机器人在复杂的非结构化环境中具有识别环境和自主决策能力,也就是要具有人的某些智能行为。
示教再现
–示教-再现 即分为示教-存储-再现-操作四步进行。
•示教:方式有两种
(1) 直接示教-手把手;
(2) 间接示教-示教盒控制。
•存储:保存示教信息。•再现:根据需要,读出存储的示教信息向机器人发出重复动作的命令。
控制信息
•顺序信息:各种动作单元(包括机械手和外围设备)按动作先后顺序的设定、检测等。
•位置信息:作业之间各点的坐标值,包括手爪在该点上的姿态,通常总称为位姿(POSE)。
•时间信息:各顺序动作所需时间,即机器人完成各个动作的速度。
2、工业机器人的技术参数
表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space) 工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。工作空间的性状和大小反映了机器人工作能力的大小。理解机器人的工作空间时,要注意以下几点:
(2)有效负载(Payload) 有效负载是指机器人操作机在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示操作机的负荷能力。
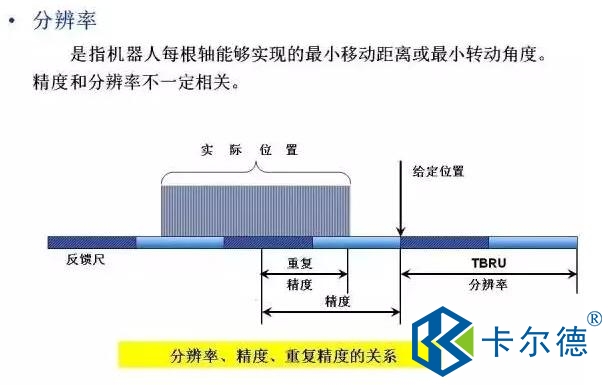
(3)运动精度(Accurucy) 机器人机械系统的精度主要涉及位姿精度、重复位姿精度、轨迹精度、重复轨迹精度等。
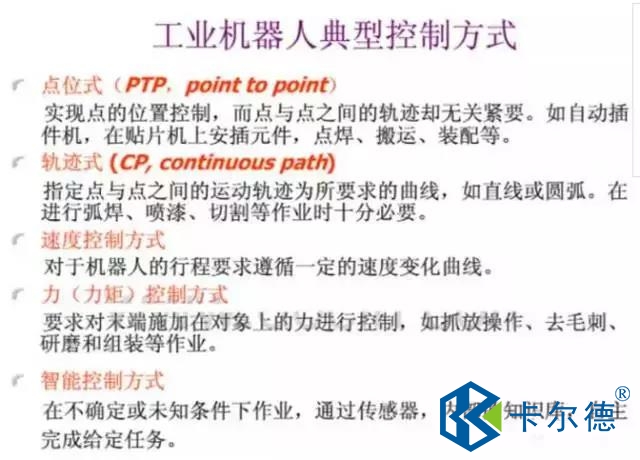
(4)运动特性(Sped) 速度和加速度是表明机器人运动特性的主要指标。
(5)动态特性 结构动态参数主要包括质量、惯性矩、刚度、阻尼系数、固有频率和振动模态。
工作精度
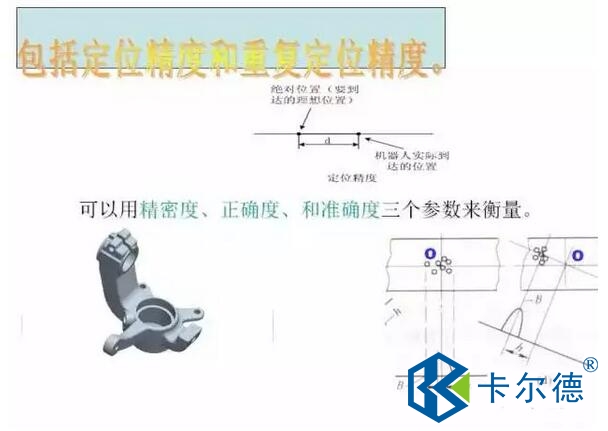
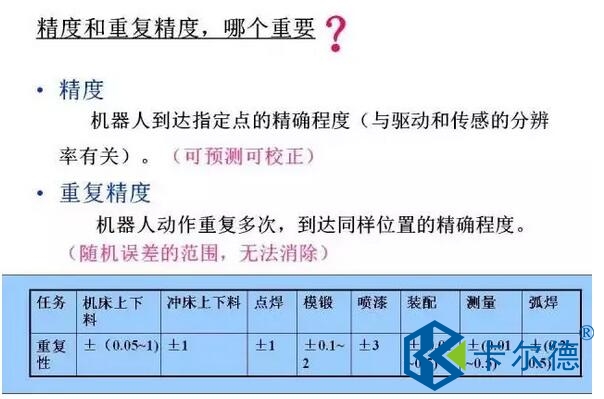
重复性(Repeatability)或重复精度:指机器人重复到达某一目标位置的差异程度。或在相同的位置指令下,机器人连续重复若干次其位置的分散情况。它是衡量一列误差值的密集程度,即重复度。




卡尔德柔性电缆温馨提示:拖链电缆、耐折电缆、机器人电缆、伺服电缆、直线电机电缆推荐源至德国的卡尔德电缆!质量有保障!


 粤公网安备 44190002002147号
粤公网安备 44190002002147号